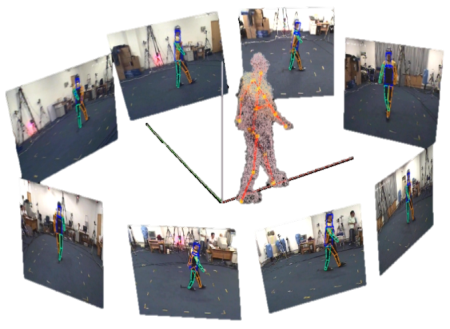
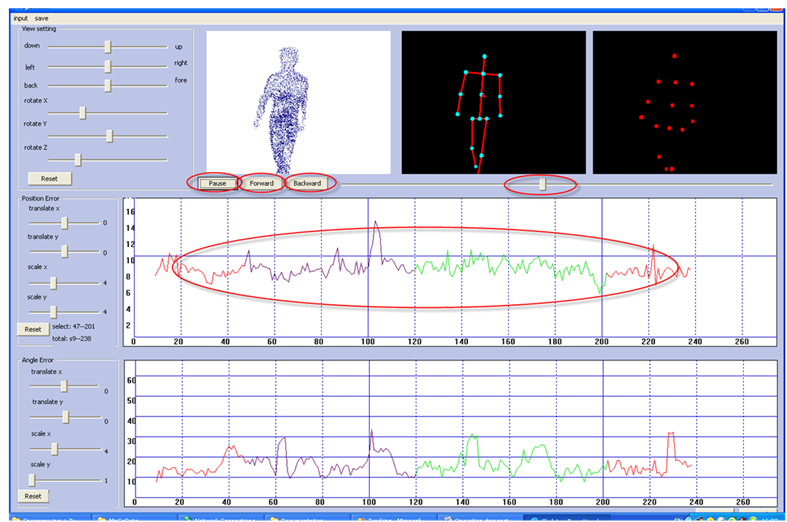
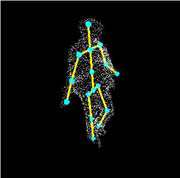
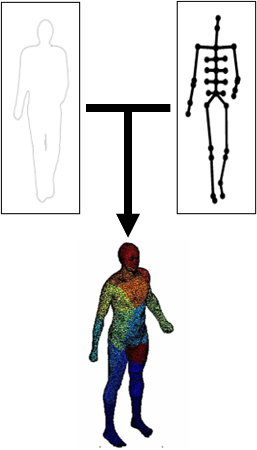
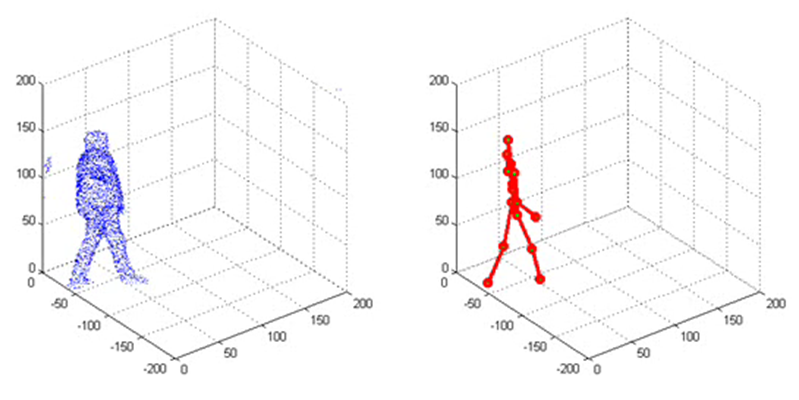
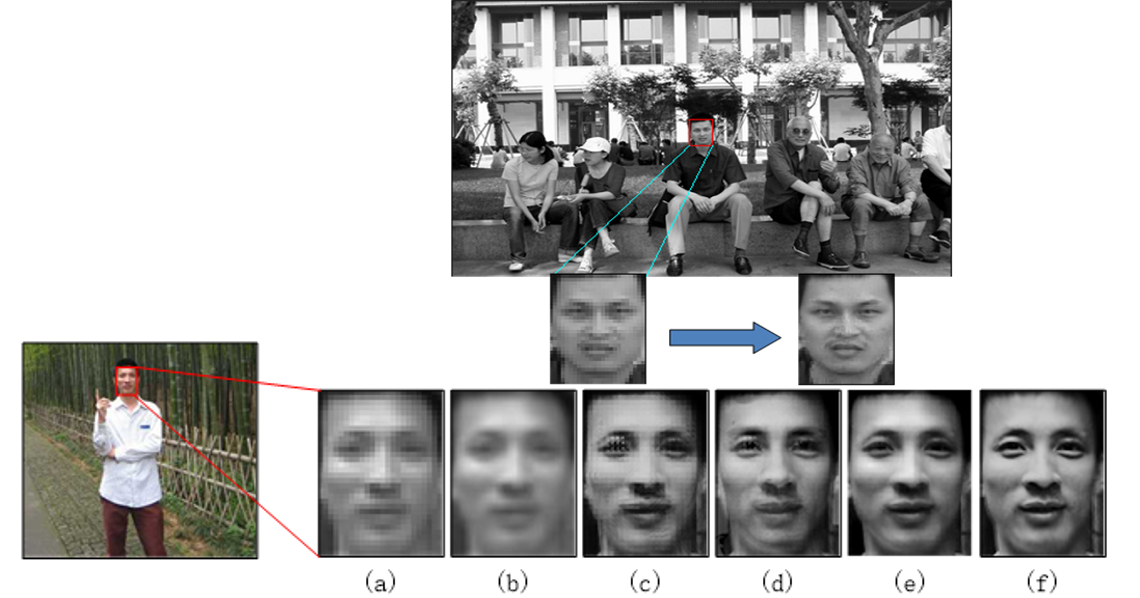
在单目摄像机环境下,采用人体图像轮廓特征信息和人体三维骨架模型,利用人体三维卷积曲面模型以及机器学习方法,求解人体骨架的三维运动参数,并进而构建人体的面片网格动态模型。相应的研究论文发表于 IEEE trans on Image Processing等学术期刊。
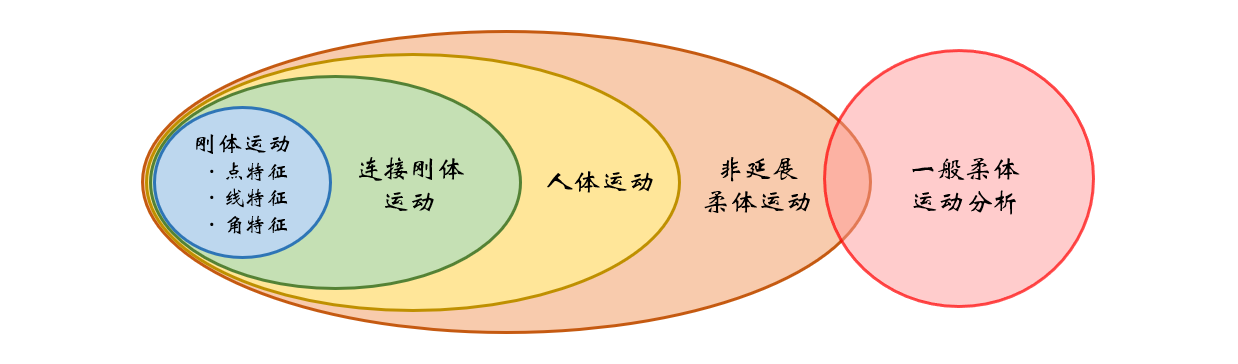
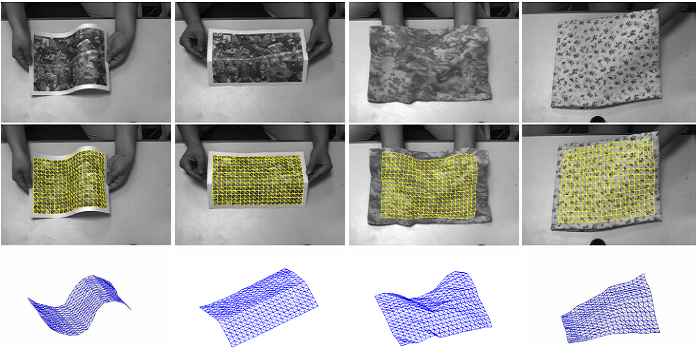
非延展柔体运动分析 Non-extended Soft Body Motion Analysis
柔性物体的三维运动分析是至今尚未得到解决的计算机视觉理论之一。我们针对一种柔性物体的特例 — 非延展柔体进行了双目视觉和单目视觉环境下的三维运动分析,采用凸优化理论,得到了满意的实验结果。相关研究论文发表于 IEEE trans on Image Processing、Pattern Recognition等学术期刊。